作品简介
1. 作品名称:核电站双臂应急处置机器人
2. 参赛学生:贺翔、秦齐、孙尧、刘自若、张晓
3. 指导教师:万熠、梁西昌
4. 作品简介:
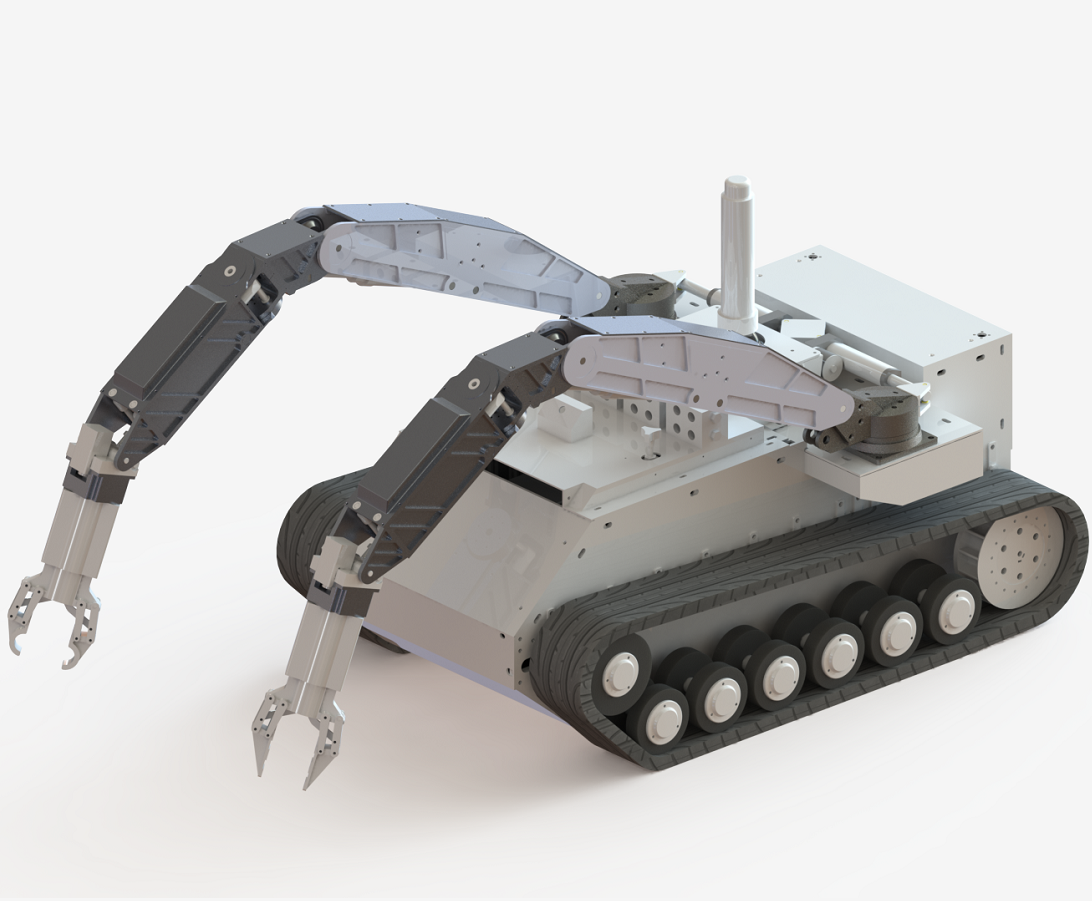
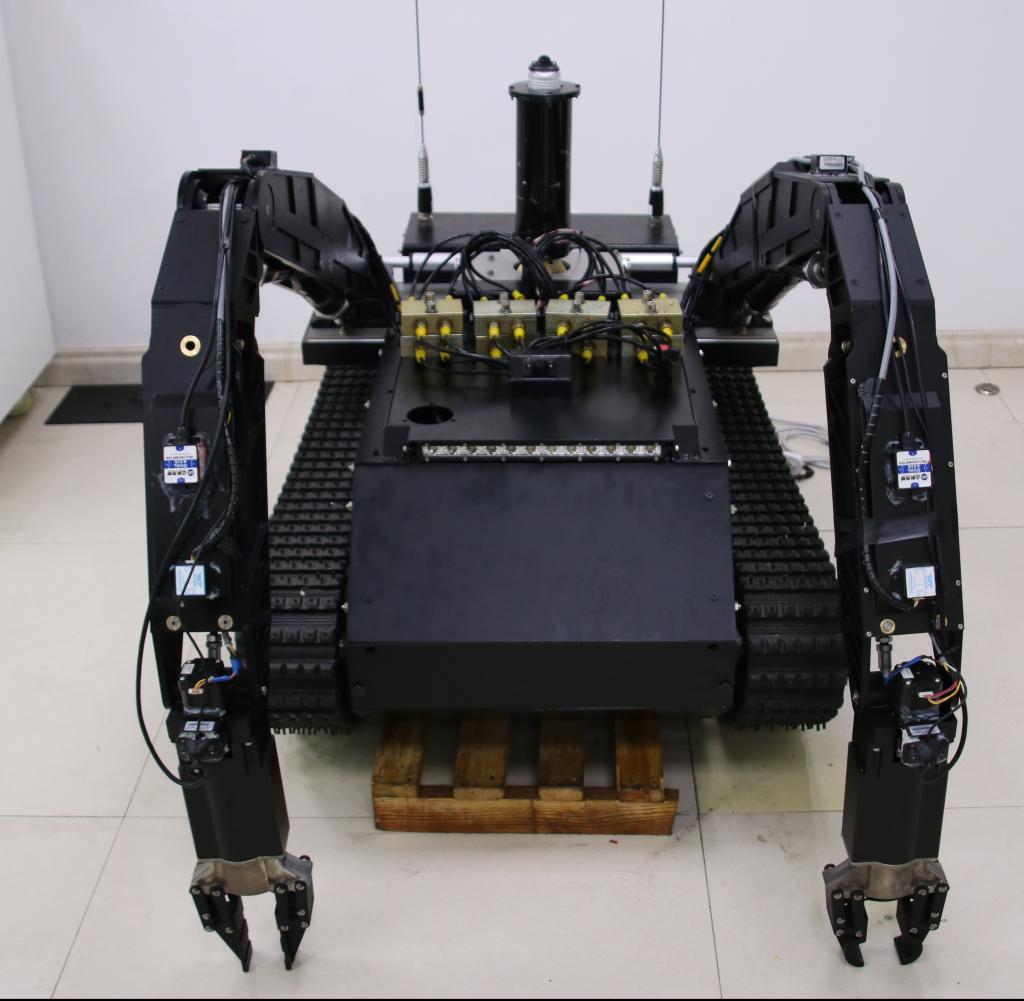
针对放射源失控、核事故泄露等重大公共安全事故研发的核电站双臂应急处置机器人。通过人员在远距离操作集装箱内的遥控操作,实现了机器人在事故现场区域的越障、爬坡等行为;通过实时遥控双臂的运动,实现了机器人对作业现场物体的抓取、搬运、阀门扭转等操作;此外机器人还具有对放射源的探测与定位等功能。核电站应急机器人可在核事故现场进行工作,具备防辐射能力、放射源探测能力、远程监控和远程实时操作能力。
自主设计机器人六自由度机械臂,采用主从控制的方法,建立主手与所设计机械臂的映射关系,提出一种融合终端滑模、模糊控制与自适应控制等算法的机械臂运动控制方法,提高机械臂运动控制精度。从机器人机械结构、材料的选择和加工工艺三方面进行研究,建立核电站应急处置机器人轻量化设计方法。保证机器人在辐射环境下既具备较大的负载能力,可以携带重工具进行工作,又具备重量轻、易于操作的特点。
核电站紧急救灾机器人是在核电站事故发生后的结构化与非结构化相混杂的无网络狭窄空间核辐射环境下服役、实现灵活运动、大负载作业和远程操控的装备。核电站应急状态和事故发生条件下,核电站紧急救灾机器人的服役环境及其作业任务极端复杂,因此核电站紧急救灾机器人的研究,对开发我国核电站紧急救灾机器人装备、建立和完善快速高效的核电事故应急救援体系、保障国家核电安全生产具有重大意义,已成为我国核电站紧急救灾机器人发展的必然趋势。